
Controlar motores de corriente continua con Puente H
Teoría e implementación de un Puente H para controlar motores de corriente continua
Para controlar la dirección en la que gira un motor de corriente continua, se necesita invertir la polaridad de la conexion eléctrica del motor en cuestión, de alguna manera hay que intercambiar los cables que alimentan el dispositivo.
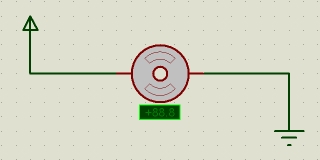
Si pensamos en una conexión normal como la de la siguiente imagen, vemos como cada terminal del motor recibe un polo distinto. Con la conexión anterior conseguimos que el motor gire en un sentido cualquiera, si necesitamos que gire en el sentido contrario, basta con intercambiar las conexiones, pero esto solo es útil si no necesitamos conmutar rápidamente entre una dirección u otra.
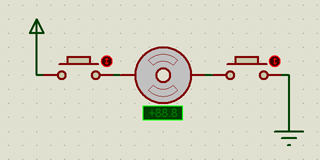
Si volvemos a pensar en el circuito, ahora considerando interruptores que controlen las conexiones, podríamos encontramos con la siguiente configuración, donde un botón interrumpe el paso desde la alimentación a uno de los terminales del motor y otro botón, bloquea la conexión a tierra, si presionamos los dos botones al mismo tiempo el motor girara en un sentido.
Aprovechando este tipo de conexiones podríamos armar dos circuitos separados que compartan el mismo motor, así, si activamos un par de botones podemos hacer que gire en un sentido, y activando el otro par de botones, el motor gira en el sentido contrario.

De acuerdo a la figura, si presionamos los botones 1 y 4 completamos un circuito para el motor, de la misma manera que con los botones 2 y 3. Ahora, si tenemos que tener en cuenta que los botones 1 y 2, o 3 y 4 al mismo tiempo, cerraran el circuito directamente desde la fuente a la tierra y el motor no recibirá energía.
Al accionar los 4 botones al mismo tiempo, causaremos dos veces el cortocircuito anteriormente descrito junto con frenar el motor si es que este se encuentra girando. En esta solución solo vamos a considerar el cambio de dirección de giro del motor, el frenado del Puente H implica un poco mas de ciencia que causar un cortocircuito general de los componentes.
A partir de este simple concepto, podemos implementar algún sistema de control remoto que nos permita accionar un motor junto con controlar su dirección de giro, solo debemos mejorar el circuito para lograr por un lado, reunir el actuar de los pares de interruptores (1-4 y 2-3) a un control más simple y al mismo tiempo aislar el circuito del motor, del circuito de control, de esta manera podríamos manejar motores de un voltaje X, con un circuito que utiliza un voltaje Y.
Incluso debemos tomar en cuenta que el motor al dejar de ser alimentado probablemente siga girando por inercia, en este caso se comportaria como un generador, entregando corriente al circuito que lo controla.
Puente H con Relés

El uso de relés para reemplazar los botones del circuito base, podría ser una muy buena solución para aislar el circuito del motor del circuito de control, los relés funcionan como botones mecánicos accionados eléctricamente, es decir, alimentamos un sistema eléctrico que a su vez acciona otro sistema eléctrico, aislado.
Pareciera no tener sentido pero este mecanismo nos permite controlar voltajes altos, a partir de voltajes mucho menores. En la figura vemos como hay dos circuitos, por un lado el circuito base que activa el motor, se ve interrumpido por el relé. Por otro lado, está el circuito que controla el relé, este también está interrumpido, en este caso por un pulsador normalmente abierto. Al pulsar el interruptor, se cierra el circuito del relé y este se energiza, a su vez, el relé en funcionamiento, acciona el interruptor que controla el motor, cerrando este circuito, accionando el motor.
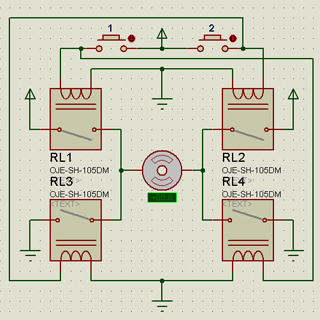
El anterior ejercicio podría parecer un gasto innecesario de componentes, pero en el caso de implementar un Puente H, podemos sacarle buen provecho como en la figura anexa.
Aquí, los cuatro botones han sido reemplazados por relés y la alimentación eléctrica de los relés está controlada por solo dos pulsadores, estos permiten accionar los relés por parejas, el pulsador 1 alimenta los relés RL1 y RL4 y el pulsador 2, RL2 y RL3, además podemos ver que el circuito que controla los relés puede ser completamente distinto (y aislado) del que alimenta el motor, incluso los circuitos que alimentan el motor para que gire en un sentido, puede ser distinto que alimenta el motor cuando gira en dirección contraria.
Puente H con transistores
Utilizando un transistor como interruptor, podemos replicar los esquemas anteriores, debemos recordar eso si que los transistores son componentes electrónicos, no electromecánicos como los relés vistos anteriormente, aquí el circuito es un poco más complejo, no solo por el sub circuito que hace funcionar el transistor, hay algunas consideraciones sobre los voltajes que manejemos.

En este esquema, vemos como el transistor se comporta como interruptor, hay un circuito que alimenta el motor y se ve interrumpido por la conexión al colector y emisor del transistor, por otro lado desde la fuente se alimenta la base del transistor, el voltaje que alimenta la base se ve deisminuido por una resistencia y un pulsador interrumpe además el circuito a la base del transistor.
El transistor actúa como una puerta desde un lado a otro, en este caso desde el colector al emisor, la base se comporta como el portero, si no recibe electricidad la puerta permanece cerrada, si recibe una señal, se abre. El voltaje que estimula la base es mucho menor que el que entra por el colector, por eso en este caso hay una resistencia a la base.

Este seria un esquema mas acabado de un Puente H, utiliza transistores NPN y PNP y algunos diodos rectificadores.
Por ultimo debemos considerar que las caracteristicas de cada componente van a determinar las capacidades del Puente H, tanto en voltaje y amperaje que pueda manejar, las caracteristicas de las señales con que opera, el consumo del mismo circuito, etc. Tambien debemos considerar las caracteristicas del motor que deseamos controlar.
Circuitos integrados

El circuito de un Puente H en general es muy utilizado, en robótica debe ser uno de los imprescindibles, es por eso que, además de una infinidad de circuitos desarrollados a partir de componentes sueltos, podemos encontrarlos como circuitos integrados, hay una variedad suficiente como para desarrollar pequeños proyectos sin invertir en los gastos de un desarrollo más grande, aunque en general no son componentes baratos. Hemos probado el modelo L298, muy útiles y con un desempeño acorde a la mayoria de las necesidades, sirve para controlar dos Motores DC.
El L298, en realidad, son cuatro circuitos independientes, que funcionan como medio Puente H cada uno, de esta manera podemos utilizarlo para controlar dos motores independientemente solo es cosa de orden al armar la circuiteria. En las imágenes se ven las conexiones en base a la numeración de los terminales, no representan para nada la forma en que se encuentran en el chip.

Hacer que funcione podría ser un sufrimiento eterno si no revisamos el datasheet, el componente está pensado para ser más flexible que un par de Puentes H, esto mismo es lo que nos complica al ver su gran cantidad de terminales si el circuito, que hemos descrito hasta ahora, requiere menos que eso.
Veamos por partes, en este caso, al modelo Multiwatt15, sus terminales se encuentran alternados adelante y atrás pero al mirarlo de frente podemos ubicar todos alineados de izquierda a derecha, con la numeración de 1 a 15 respectivamente (los números no están marcados, hay que contar de izquierda a derecha). Otros modelos Dip-16 por ejemplo, siguen la logica habitual de numeracion.
Como la mayoría de los circuitos integrados, el L298 necesita una línea de alimentación para su funcionamiento lógico interno, para eso contamos con el pin 9, aquí debe ir conectada la fuente de alimentación lógica (hasta 7V, idealmente 5V) por otro lado los motores que controla tienen una alimentación distinta, para eso tenemos el pin 4 (hasta 50V), la tierra es común a estas dos líneas de alimentación y se encuentra en el pin 8.
Para considerar este chip como 2 puentes h independientes debemos saber cuáles son sus salidas y cuales sus entradas de control, para salida del primer puente están los pines 2 y 3, es decir aquí va conectado uno de los motores. Para definir la dirección necesitamos dos entradas, al activar una o la otra, el motor gira en uno u otro sentido. Los pines correspondientes a las salidas 2 y 3, son 5 y 7. De la misma manera tenemos el segundo Puente H, con salidas en los pines 13 y 14 (aquí va el segundo motor), controladas por las entradas 10 y 12.
Como opciones extra tenemos un par de conectores que nos permiten activar o desactivar los puentes h descritos, esto no se refiere al sentido en que giran los motores, simplemente se trata de si los circuitos funcionan o no. Lo que hacen las entradas es activar el funcionamiento del puente al recibir un voltaje cercano al de su alimentación lógica (pin 9), entonces si queremos activar el funcionamiento del primer puente, el terminal 6 debe estar activado, el segundo puente es controlado por el pin 11, podemos conectar ambos terminales directamente a la alimentación lógica si queremos que siempre estén habilitados. El ultimo bono en terminales lo dan los extremos, que al compararse con el terminal 8 podemos determinar la carga a la que se somete cada Puente H, el primero se monitorea en el pin 1, el segundo en la 15, podemos derivarlas directamente a tierra si no nos interesa esta función.
Como ultima acotación, este chip funciona con voltajes TTL en sus entradas, debemos asegurarnos que las entradas que no están activadas estén realmente desactivadas. En general si trabajamos con algún micro controlador las salidas digitales de estos son High o Low, con eso bastaría, ahora si queremos hacerlo funcionar con una botonera tendríamos que pensar en utilizar pulldowns, resistencias relativamente altas conectadas a tierra, para asegurarnos que las entradas estén en Low constantemente y al ser activadas el voltaje de activación alcance los 5V.